Environment Overview
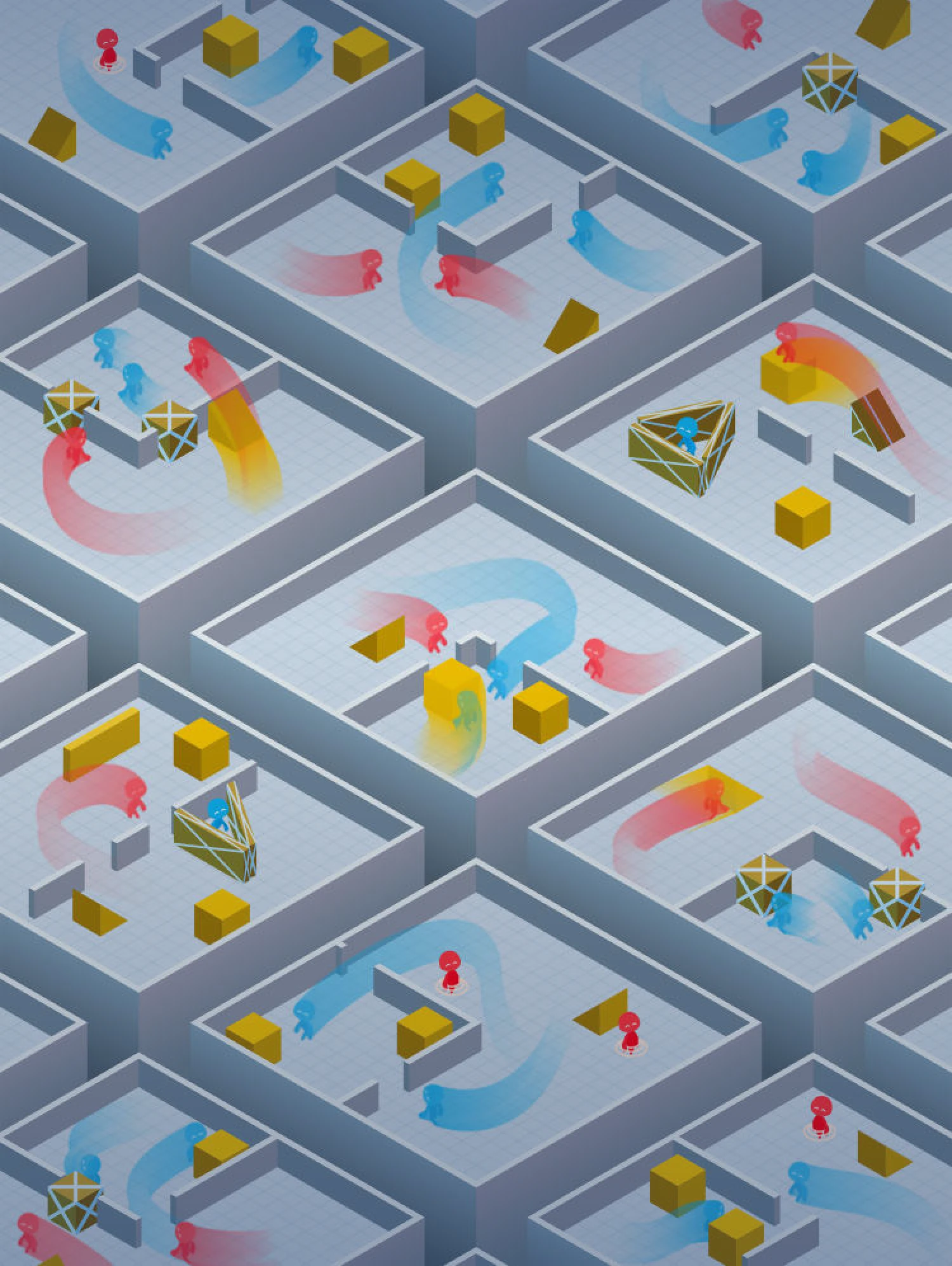
In our environment, agents play a team-based hide-and-seek game. Hiders (blue) are tasked with avoiding line-of-sight from the seekers (red), and seekers are tasked with keeping vision of the hiders. There are objects scattered throughout the environment that hiders and seekers can grab and lock in place, as well as randomly generated immovable rooms and walls that agents must learn to navigate.